:quality(80)/p7i.vogel.de/wcms/90/b2/90b240941bfb468e97806eb6f398576d/0132036089v1.jpeg "(Bild: Save)")
:quality(80)/p7i.vogel.de/wcms/d2/2d/d22d592ba44629ec535ae837a0bf9591/0132014853v2.jpeg "Thomas Seiler, Präsident des Schweizer Service Verbands (SKDV): «Wer KI als Assistenten begreift, kann damit schneller, präziser und effizienter im Service und in der Instandhaltung werden.» (Bild: www.susanneseiler.ch)")
:quality(80)/p7i.vogel.de/wcms/ba/65/ba6531f7285bffc83e9e03783b3db0b4/0131474634v2.jpeg "Manuel Zoller, Messeleiter der Prexcon: «Unser Ziel ist es, die prexcon als langfristige Innovationsplattform für die Präzisionstechnik zu etablieren und den Austausch zwischen Forschung und Industrie nachhaltig zu stärken.» (Bild: Olma Messen)")
:quality(80)/p7i.vogel.de/wcms/ff/47/ff470fed5e5d2061253eee433f640bdc/0131969976v1.jpeg "(Bild: Syslogic )")
:quality(80)/p7i.vogel.de/wcms/34/65/34659f403fee289597e343af3ee77b11/0132022605v2.jpeg "Die flexible, leistungsstarke Getriebefamilie GPT wird in Durchmessern zwischen 14 und 42 mm angeboten sowie in Low-Noice und High-Torque-Varianten. (Bild: Faulhaber)")
:quality(80)/p7i.vogel.de/wcms/4f/68/4f68e4441c1455ef20810165f94e6596/0131810822v2.jpeg "«Das Ziel unserer Forschungsarbeit ist, dass sich Roboter auch in der Nähe von Menschen agil und sicher bewegen können. Dazu müssen diese Roboter die Umgehung in Echtzeit sehen und verstehen.» (Bild: Thomas Entzeroth)")
:quality(80)/p7i.vogel.de/wcms/dd/09/dd09596be94b4ee87d668b5511538e2b/0131048763v2.jpeg "(Bild: Faulhaber)")
:quality(80)/p7i.vogel.de/wcms/58/40/58401bca8737eee4a8f38f5bf06e3b75/0131952180v2.jpeg "Die neuen elektromagnetischen Scheibenbremsen der Ringspann-Baureihe DA sind ausgelegt für den Einsatz in Stahl-, Hafen- und Kraftwerkskranen oder grossen Förder-, Schüttgut- und Zerkleinerungsanlagen. (Bild: Ringspann)")
:quality(80)/p7i.vogel.de/wcms/c4/b5/c4b575d792c34cdd555e40284e4ec2cf/0131049207v2.jpeg "(Bild: Phoenix Contact )")
:quality(80)/p7i.vogel.de/wcms/38/1f/381f6a1fb80ea58b816f6b058d1ae6b4/0131963607v1.jpeg "(Bild: Schurter)")
:quality(80)/p7i.vogel.de/wcms/08/e9/08e9c6315f39ea96800a555c7da32fd4/0131946183v1.jpeg "Ziel des All2GaN ist es, Energieverbrauch und CO₂ Emissionen durch modulare, leicht integrierbare GaN Leistungshalbleiter zu reduzieren. (Bild: Fraunhofer IZM / Volker Mai)")
:quality(80)/p7i.vogel.de/wcms/5f/e5/5fe57ad1a595d139585e9db954f424ea/0131268744v2.jpeg "(Bild: Relmatic)")
:quality(80)/p7i.vogel.de/wcms/4f/5a/4f5a98b0c5f3bb43b80d2691761d92dd/0131495552v2.jpeg "(Bild: Micro-Epsilon)")
:quality(80)/p7i.vogel.de/wcms/9b/32/9b324825961d06d4459334391e21c1bf/0131984703v1.jpeg "(Bild: Micro-Epsilon)")
:quality(80)/p7i.vogel.de/wcms/39/d9/39d969c361f18ca48f955129d1fcfa65/0131889864v1.jpeg "Das Metracal CM ist der optimale Partner für anspruchsvolle Mess- und Kalibrieraufgaben in Industrieanlagen und deckt alle gängigen Signalarten der Prozess- und Labormesstechnik ab. (Bild: Gossen Metrawatt )")
:quality(80)/p7i.vogel.de/wcms/27/5d/275dac6ec6fe9074b46595f4280d7bdb/0131055501v2.jpeg "Mit Surfacecontrol Automotive bietet Micro-Epsilon ein roboterbasiertes Inspektionssystem zur vollautomatischen Oberflächenprüfung von Roh-Karosserien (Body-in-White). (Bild: Micro-Epsilon)")
:quality(80)/p7i.vogel.de/wcms/c2/99/c299940aa113bf394ee99550c7a9e442/0131473790v2.jpeg "Michael M. Nussbaumer, M8 GmbH. (Bild: M8 GmbH)")
:quality(80)/p7i.vogel.de/wcms/b6/b1/b6b1fe200b1f542b1f9a5df29dfc0f05/0132025280v2.jpeg "Wenn alle Schritte durchgeführt sind, kommt der finale Ausbau der vorhandenen Infrastruktur zur KI-Fabrik. (Bild: KI-generiert/Pixabay)")
:quality(80)/p7i.vogel.de/wcms/5f/93/5f9336c22adfa707baab930fba7816b3/0132004724v1.jpeg "Jan Bindig, CEO Data Reverse, zur Soforthilfe im Cybernotfall (Bild: Data Reverse)")
:quality(80)/p7i.vogel.de/wcms/9e/ad/9ead1b5718e3b0e9bc182e659b656f48/0131948103v1.jpeg "Mazda will die Entwicklung der Software-Defined Vehicles beschleunigen. Dafür wird Mazda die Application-Lifecycle-Management-Lösung (ALM) PTC Codebeamer einsetzen. (Bild: Mazda)")
:quality(80)/p7i.vogel.de/wcms/ed/0d/ed0df04a694480ff4dc58e65894fbb8c/0132005640v1.jpeg "Fourier-Pixel verwenden Oberflächenwellen, welche als Lichtwellen herausgestreut werden. Diese überlagern sich und erzeugen so Muster und Bilder. Umgekehrt können Intensität, Phase und Polarisierung einfallender Lichtwellen mit demselben Pixel analysiert werden. (Bild: Glauser YM, Vonk SJW, et al., Nature 2026)")
:quality(80)/p7i.vogel.de/wcms/7b/5c/7b5cd347ab04dc481600345e4c1a49f5/0131995773v2.jpeg "Illustration der QuINSiDa-Vision: quantensichere optische drahtlose Verbindungen zwischen fester Infrastruktur und mobilen Plattformen (z. B. Fahrzeuge, Schiffe, Drohnen, usw.) – unter Verwendung von Freistrahl-QKD und Li-Fi, integriert mit Schlüsselmanagement, Verschlüsselung und Netzwerküberwachung. (Bild: KI-generiert/Fraunhofer IPMS)")
:quality(80)/p7i.vogel.de/wcms/59/ba/59ba351d6ec50128292f0153ab7bce38/0124040720v4.jpeg "(Bild: Gribi Hydraulics)")
:quality(80)/p7i.vogel.de/wcms/aa/76/aa76ed03b7a0018cc51bef73a529269c/0124205347v2.jpeg "Die Dialysefilter werden im Dreischicht-Betrieb rund um die Uhr in einem automatischen Prüfstand unter Reinraumbedingungen getestet. (Bild: Bürkert)")
:quality(80)/p7i.vogel.de/wcms/1a/a0/1aa01f35aaecf1d5fc635c4ab1d93a61/0120564266v2.jpeg "Die kompakte Baugruppe besteht aus drei Ventilen, einem Drucksensor, einer Kondensatfalle und einer Membranpumpe, die in einer Kammer Überdruck und in der zweiten Kammer Unterdruck erzeugt. Zwischen den beiden Kammern schaltet dann ein Ventil dynamisch um, was eine Schlauchrollen-Pumpe überflüssig macht. (Bild: Fresenius Medical Care)")
:quality(80)/p7i.vogel.de/wcms/52/85/528512fe3a56c6f8d450199fc4bfbf0b/0119296574v2.jpeg "Ultraschall-Clamp-on-Durchflussmessgeräte Proline Prosonic Flow W 400 und P 500 – eingriffsfrei und einfach zu installieren – keine Prozessunterbrechung – wartungsfrei. (Bild: Endress+Hauser)")
:quality(80)/p7i.vogel.de/wcms/82/e6/82e6d70e9d84f25c586d579afe6adf1d/0130060130v2.jpeg "Sick Nova Intelligent Inspection ermöglicht skalierbare KI gestützte Bildverarbeitung für moderne Qualitäts und Automatisierungsaufgaben. (Bild: Sick)")
:quality(80)/p7i.vogel.de/wcms/3e/cf/3ecfea7fe5091e452093099a66c2cad2/0130248024v2.jpeg "Die Stärke von Elcase ist massgeschneiderte Bearbeitung von Schaltschränken und Elektrogehäusen nach kundenspezifischen Wünschen. (Bild: Elcase)")
:quality(80)/p7i.vogel.de/wcms/94/a6/94a65981a49534064cf8acd2e1551ce1/0130059180v2.jpeg "Das IO-Link Safety-Paket aus Master, Sensoren sowie Feldgeräten und passendem Zubehör von Pilz unterstützt mit Blick auf das Internet der Dinge IIoT vernetzte Maschinen und Anlagen herstellerungebunden bis auf die Sensor- bzw. Feldebene. (Bild: Pilz)")
:quality(80)/p7i.vogel.de/wcms/c8/55/c8557098bfd8d49279bd39e3a1516510/0129888420v2.jpeg "IO-Link-Topologie auf dem Förderband – von der Stromversorgung bis zu Condition-Monitoring-Sensoren. (Bild: Balluff)")
Regelungstechnik Regelungstechnik mit Smith-Prädiktor: die Crux mit der Totzeit
Will man ein System regeln, das mit Totzeit behaftet ist, das also stets verspätet reagiert, kann das sehr frustrierend sein. Standard-PID-Regler versagen oder müssen derart passiv eingestellt werden, dass am Ende von Prozess-Dynamik keine Rede mehr sein kann. Ein Smith-Prädiktor entschärft das Problem erheblich.
Anbieter zum Thema
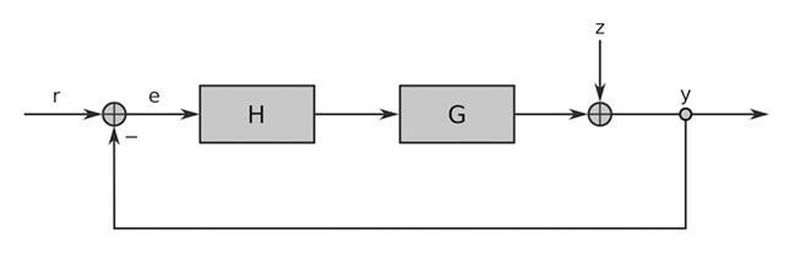
Ein klassischer Regelkreis ist in Abb. 1 dargestellt. Der Regler H treibt den Prozess bzw. die Strecke oder das System G an. Am Ausgang der Strecke G wirkt die Störgrösse z, sodass sich der Ausgang y des Systems oft nicht exakt so verhält, wie es der Sollwert r verlangt. Aus diesem Grund wird aus Soll- und Istwert der Regelfehler e = r—y berechnet, den der Regler zu null machen soll. Beinhaltet G nun eine Totzeit, wie das typischerweise bei thermischen Prozessen, bei Transport- und Abfüllanlagen, aber auch bei vielen Antriebsanwendungen mit Spiel oder Elastizität und Reibung der Fall ist, so reagiert die Strecke G immer verzögert. Das heisst, dass der Fehler e aus Werten gebildet wird, die zeitlich gar nicht zusammengehören. Oder anders ausgedrückt: Der Regler versucht jeweils einen Fehler auszuregeln, den er noch gar nicht kennt, weil er erst später auftritt. Dadurch neigt das Gesamtsystem zu Instabilität, was bedeutet, dass der Regler sehr schwach eingestellt werden muss, was wiederum dazu führt, dass der Prozess nur langsam reagiert. Das ist in Abb. 2 dargestellt. Oft ist H ein PID-Regler. Die Vorteile davon sind primär, dass dessen Verhalten leicht verständlich und nachvollziehbar ist, dass es für gutmütige Strecken einfache Einstellregeln gibt und dass seine (beschränkten) Fähigkeiten für moderate Anforderungen oft ausreichen. Mit Totzeit sieht das etwas anders aus, und es gilt folgende Faustregel für PID-Regler (dabei ist T die Totzeit und S die Zeitkonstante des Systems):
T < 0,1 × S — Der Regler für diese Strecke lässt sich leicht einstellen.
0,1 × S < T < 0,25 × S — Die Einstellung des PID-Reglers für diese Strecke ist anspruchsvoll. T > 0,25 × S — Der Regler für diese Strecke ist schwer einstellbar, und die Resultate sind oft nicht befriedigend.
Versucht man einen geeigneten Regler für eine Strecke mit Totzeit zu finden, so stellt man bald fest, dass der Regler die Fähigkeit haben müsste, in die Zukunft zu sehen. Das ist natürlich nicht möglich, aber mithilfe eines Modells kann man das zukünftige Verhalten eines System mindestens im Voraus schätzen. Der Smith-Prädiktor tut genau das.
Das Blockschaltbild eines Reglers mit Smith-Prädiktor ist in Abb. 3 dargestellt. H bezeichnet wiederum den Regler, zum Beispiel einen PID-Regler. G·T ist das Verhalten der Strecke, wobei wir jetzt davon ausgehen, dass sich die Totzeit T und das reine Verhalten der Strecke G ohne Totzeit separieren lassen. Für die Realisierung des Reglers verwendet Smith nun mathematische Modelle für G und T. Um anzuzeigen, dass es sich um Modelle handelt, sind sie in Abb. 3 mit G* bzw. T* bezeichnet. Die Modelle findet man durch System-Identifikation und entsprechende Übertragungsfunktionen. Mit diesen Modellen lässt sich die Totzeit umgehen, denn mit H und G* lässt sich ein Regelkreis ohne Totzeit bilden (linke Hälfte von Abb. 3). Der Regler H für diesen Kreis lässt sich demnach leicht nach den üblichen Regeln einstellen.
Wir simulieren an dieser Stelle den ursprünglichen Regelkreis, aber ohne die Totzeit. Folglich ist y0* eine Vorhersage des wahren Streckenausgangs y. Da das Modell G* und die geschätzte Totzeit T* in der Regel nicht perfekt sind, wird mithilfe von H und G* × T* noch eine Schätzung von y gemacht. Wir nennen sie y*. Mit y—y* erhält man schliesslich den verbleibenden Regelfehler, der auf Grund des Modellfehlers und der Störgrösse z resultiert (rechte Seite von Abb. 3). Dieser Restfehler wird ebenfalls auf den Regler H zurückgeführt.
Es zeigt sich (siehe Abb. 4), dass mit dieser Topologie deutlich bessere Resultate erzielt werden als mit dem einfachen PID-Regler gemäss Abb. 1. Die Modell-basierte Regelung mit Smith-Prädiktor ist ziemlich robust gegenüber Modellfehlern. Dennoch gilt natürlich: Je besser das Modell, desto besser die Regelgüte. Darin besteht auch die Herausforderung bei der Realisierung.
(ID:47695571)
:quality(80)/p7i.vogel.de/wcms/97/46/97465351da255e6b7068148ac5b41fcf/0129075731v2.jpeg "Der KI-generierte Demonstrationsschrank, der auf der SPS 2025 erstmals gezeigt wurde, entstand als Gemeinschaftsprojekt von WSCAD, ABB, Phoenix Contact und häwa. (Bild: Phoenix Contact)")
:quality(80)/p7i.vogel.de/wcms/74/de/74de1a2ca2978f6ed55004f43784e65c/0128546891v1.jpeg "0128546891v1 (Bild: KI-generiert)")